www.cavefischer.at/Sharp Pocket Computer
Drucken am SHARP Thermodrucker CE-125 mit Arduino UNO
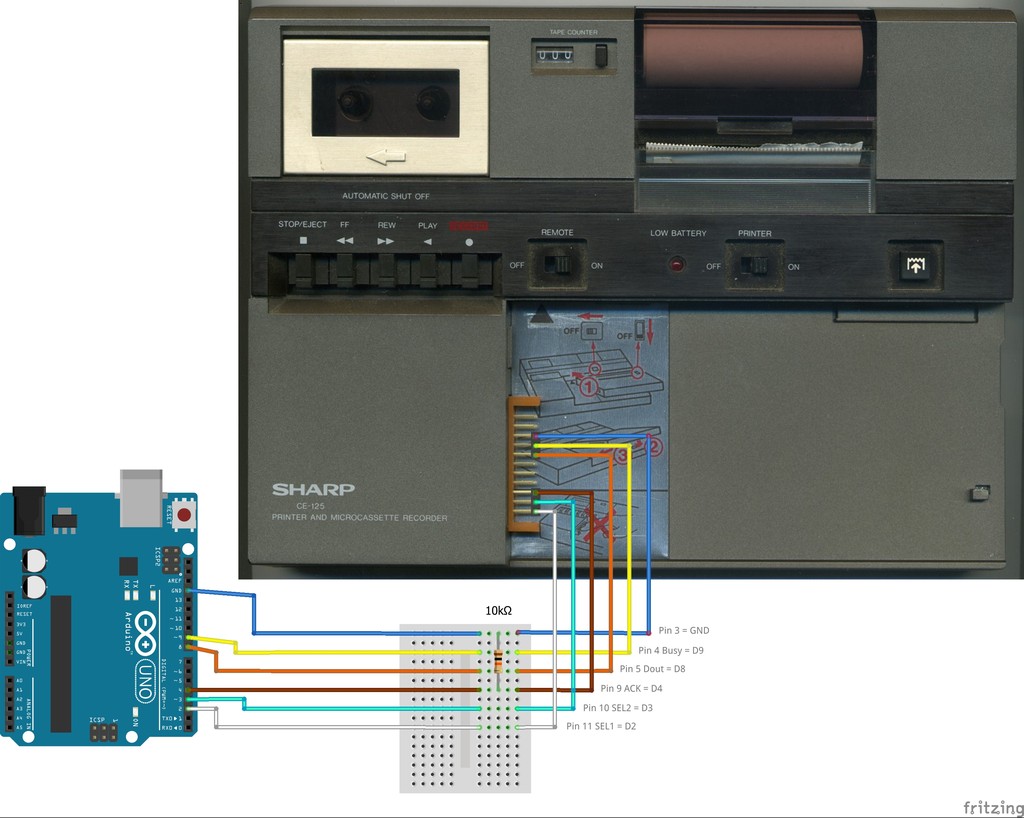
Dieses Arduino Programm druckt mit einem Arduino UNO am Sharp Thermodrucker CE-125.
| Pinbelegung |
| Arduino UNO Pin |
Name |
Sharp CE-125
11-pol. Stecker |
| GND |
GND |
Pin 3 |
| D9 (Output) |
Busy (FO1) |
Pin 4 |
| D8 (Output) |
Dout (FO2) |
Pin 5 |
| D4 (Input) |
ACK (IB7) |
Pin 9 |
| D3 (Output) |
SEL2 (IB6) |
Pin 10 |
| D2 (Output) |
SEL1 (IB5) |
Pin 11 |
 |
// Print to Sharp CE-125
const int OUT_SEL1 = 2; // Pin D2, SEL1, pin 11 CE-125
const int OUT_SEL2 = 3; // Pin D3, SEL2, pin 10 CE-125
const int IN_ACK = 4; // Pin D4, ACK, pin 9 CE-125
const int OUT_Dout = 8; // Pin D8, Dout, pin 5 CE-125
const int OUT_Busy = 9; // Pin D9, Busy, pin 4 CE-125
const int InfoLED = 13;
boolean ACK;
int DataBit;
long Timeout;
int i;
byte SharpString[] = {byte('H'), // 1
byte('E'), // 2
byte('L'), // 3
byte('L'), // 4
byte('O'), // 5
byte(' '), // 6
byte('W'), // 7
byte('O'), // 8
byte('R'), // 9
byte('L'), // 10
byte('D'), // 11
byte(' '), // 12
byte(' '), // 13
byte(' '), // 14
byte(' '), // 15
byte(' '), // 16
byte(' '), // 17
byte(' '), // 18
byte(' '), // 19
byte(' '), // 20
byte(' '), // 21
byte(' '), // 22
byte(' '), // 23
byte('*')}; // 24
void setup() {
pinMode(IN_ACK, INPUT);
pinMode(OUT_Dout, OUTPUT);
pinMode(OUT_Busy, OUTPUT);
pinMode(OUT_SEL1, OUTPUT);
pinMode(OUT_SEL2, OUTPUT);
pinMode(InfoLED, OUTPUT);
// Example 1, The array must always contain 24 bytes!
printLine(SharpString);
// Example 2
printLine("ABCDEFGHIJKLMNOPQRSTUVWX");
// Example 3
strcpy(SharpString, "This are twentyfour byte");
printLine(SharpString);
} // End setup
void loop() {
} // End loop
void printLine(char aLineStr[]) {
digitalWrite(InfoLED, HIGH);
selectPrinter();
delayMicroseconds(5000);
digitalWrite(OUT_SEL2, HIGH);
for(int y=0; y<24; y++){
printByte(aLineStr[y]);
}
printByte(13);
delayMicroseconds(1000);
digitalWrite(OUT_SEL2, LOW);
delay(500);
digitalWrite(InfoLED, LOW);
delay(500);
} // End printLine
void printByte(int aDataByte) {
i = 0;
do {
DataBit = aDataByte & (1 << i);
digitalWrite(OUT_Dout, DataBit);
digitalWrite(OUT_Busy, HIGH);
Timeout = millis();
do {
ACK = digitalRead(IN_ACK);
if (millis() - Timeout > 50) break;
} while (!ACK);
delayMicroseconds(500);
digitalWrite(OUT_Busy, LOW);
Timeout = millis();
do {
ACK = digitalRead(IN_ACK);
if (millis() - Timeout > 50) break;
} while (ACK);
delayMicroseconds(500);
i++;
} while (i < 8);
} // End printByte
void selectPrinter() {
digitalWrite(OUT_SEL1, HIGH);
digitalWrite(OUT_SEL2, HIGH);
delayMicroseconds(1000);
digitalWrite(OUT_SEL1, LOW);
Timeout = millis();
do {
ACK = digitalRead(IN_ACK);
if (millis() - Timeout > 50) break;
} while (!ACK);
Timeout = millis();
do {
ACK = digitalRead(IN_ACK);
if (millis() - Timeout > 50) break;
} while (ACK);
delayMicroseconds(1000);
digitalWrite(OUT_SEL2, LOW);
} // End selectPrinter
zum Seitenanfang
© 2018-2020: Walter Fischer